I built this Arduino radar project, where I control the brightness of an LED with my breath. In this tutorial, I will show you exactly how to do it.
It was an experiment to get the XeThru radar to work with Arduino. I plan to expand on this later and build more useful applications.
And I will share with you how to connect the hardware, and how to create the Arduino code.
Just to be clear: This is not a sonar pretending to be a radar. This is a radar. With electromagnetic waves.
The Hardware
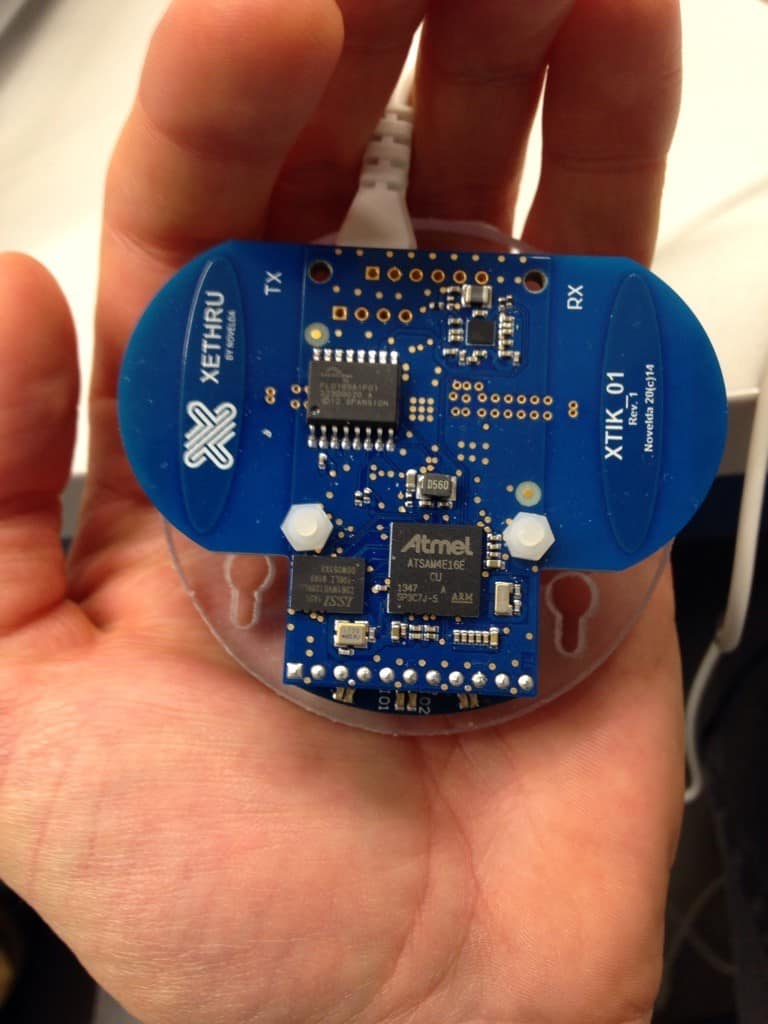
XeThru is a radar module from Novelda. You can use it to detect movement in a room, and even measure the breath of a person, without contact.
Since it’s using electromagnetic waves, you could build it into your wall or some other object, to create an invisible intruder alarm sensor.
For example:
Basic Electronics for Arduino Makers
Learn the basics that every Arduino maker should know, and it'll open you up to a world of possibilities! Sign up for my circuit tips by email and I'll send you the eBook:
You could build it into an alarm clock, and place it on your nightstand. Without anything connected to your body or your bed.
Then it would monitor your breathing pattern and your movements throughout the night. This information can help you understand the quality of your sleep. Are you getting the sleep cycles you need?
Or, you could build it into a handheld device for the police. They can place it on a door to see if there is anyone in the room before entering.
There are other radars available, like these:
http://reactancelabs.com/?p=293
http://hackaday.com/2014/06/14/the-first-arduino-radar-shield/
But they’re quite big, because of their antennas.
The XeThru module fits in my hand:
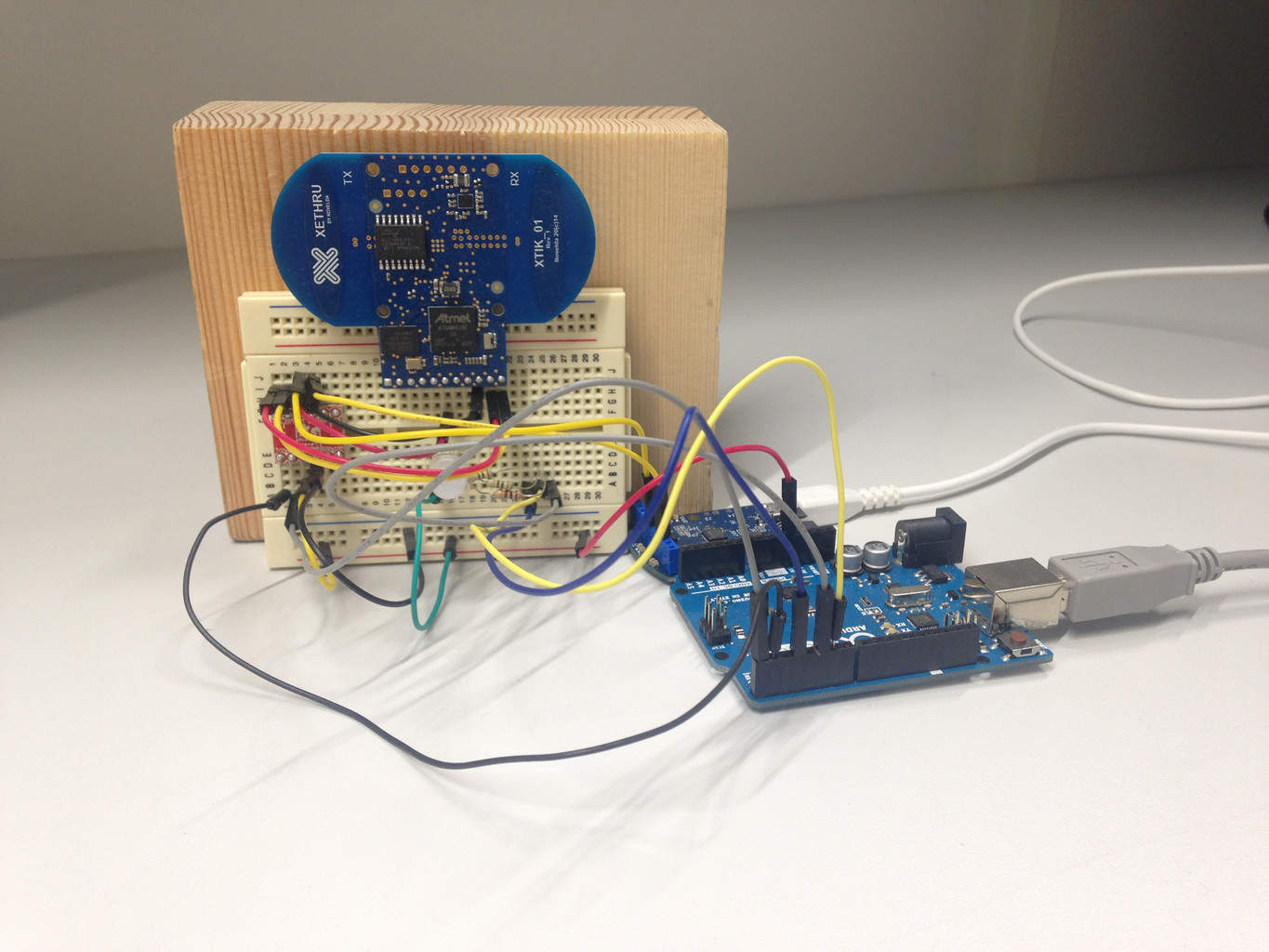
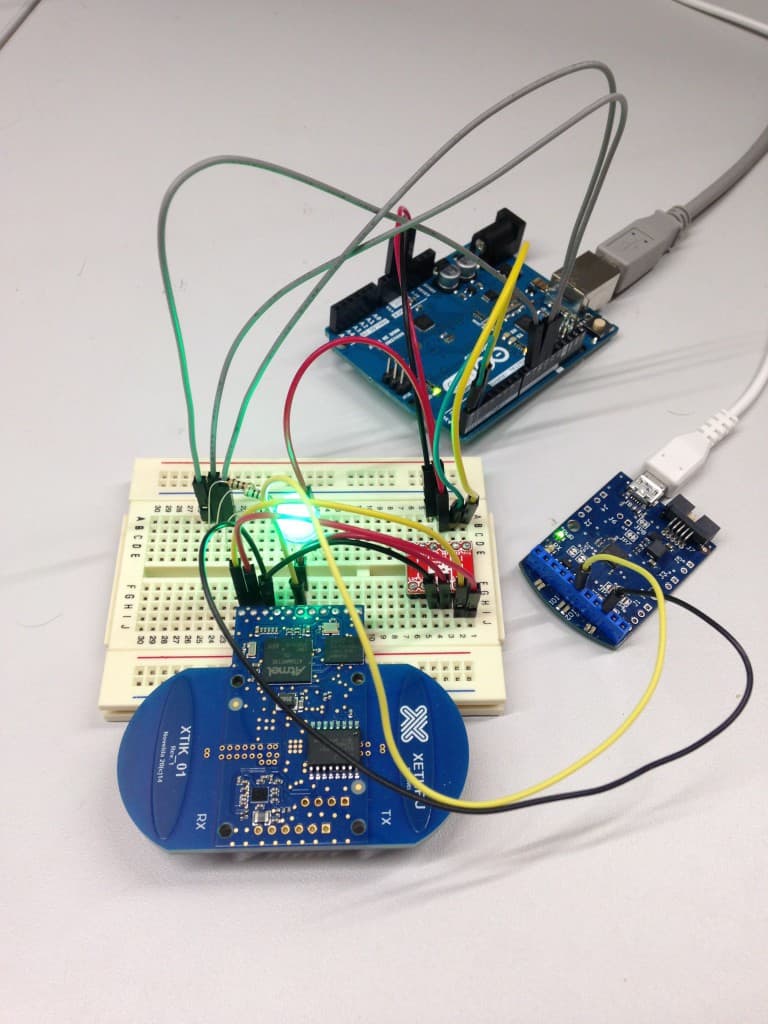
How To Connect
You control the XeThru radar module with two UART pins.
I used an Arduino UNO, with an RGB LED and three 100 Ohm resistors.
The module uses 2.8V levels. Since my Arduino uses 5V levels, I needed a voltage level converter. Other than that, it was pretty straightforward.
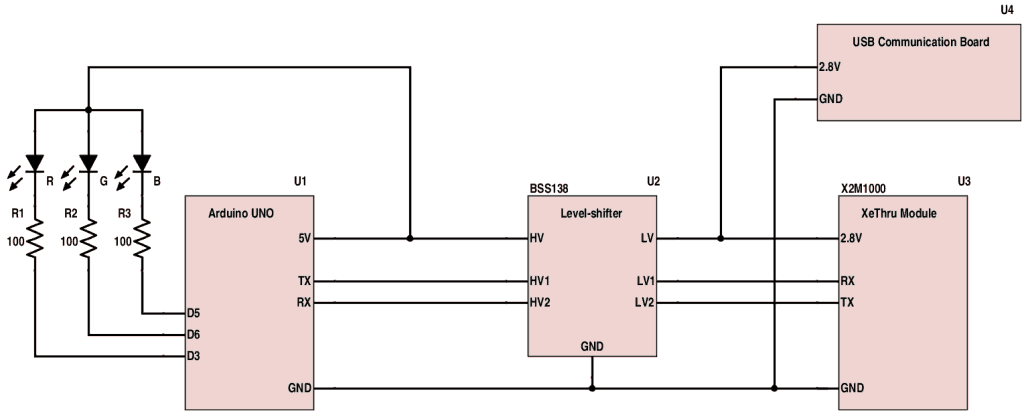
The level shifter I used, was a BSS138 board from Tinkersoup here in Berlin.
To make it work, I also needed a 2.8V supply. Luckily, the USB module for the XeThru radar has a 2.8V supply pin that I could use.
Pitfall:
I spent a lot of time scratching my head in the beginning. I didn’t get any response from the radar! The reason was that I had forgotten to connect the ground…
Writing Code for the Arduino Radar
From the documentation of the serial protocol of the radar, I found out how to get the radar to send me respiration data:
- Reset the radar
- Load an app
- Set configurations (if any)
- Start the app
In the beginning, I had some problems. I just didn’t get any respiration data from the radar. After discussing the problem on the XeThru forum, I found that I had the wrong byte order for the application code.
I fixed that, and data came streaming in!
Type Conversion
Another thing I was struggling with, was type conversion. And with only an RGB LED as my output, it was a bit hard to debug. So I connected another Arduino with SPI, which I could use as a debugging console for a while, and got the type conversion sorted out.
I parsed the data that was coming in and used the movement value to set the brightness of the LED. This way, the LED faded in and out with the tiny movement of my body when breathing in and out.
Really cool to experience!
The Arduino did not process the data fast enough, so I also added a function to empty the buffer and sync the data every time I fetched a new measurement. This way, I always got fresh data.
I’ve created a GitHub repository for the Arduino radar code, where you can find the latest version of the code. The plan is to turn it into a proper Arduino library for the XeThru radar.
The code I used at the beginning
//LED pins
const int red_pin = 3;
const int green_pin = 6;
const int blue_pin = 5;
// Radar constants
const unsigned char xt_start = 0x7D;
const unsigned char xt_stop = 0x7E;
const unsigned char xt_escape = 0x7F;
const unsigned char xts_spc_appcommand = 0x10;
const unsigned char xts_spc_mod_setmode = 0x20;
const unsigned char xts_spc_mod_loadapp = 0x21;
const unsigned char xts_spc_mod_reset = 0x22;
const unsigned char xts_spc_mod_setledcontrol = 0x24;
const unsigned char xts_spr_appdata = 0x50;
const long xts_id_app_resp = 0x1423a2d6;
const long xts_id_resp_status = 0x2375fe26;
const unsigned char xts_sm_run = 0x01;
const unsigned char xts_sm_normal = 0x10;
const unsigned char xts_sm_idle = 0x11;
const unsigned char xts_val_resp_state_breathing = 0; // Valid RPM detected Current RPM value
const unsigned char xts_val_resp_state_movement = 1; // Detects motion, but can not identify breath 0
const unsigned char xts_val_resp_state_movement_tracking = 2; // Detects motion, possible breathing 0
const unsigned char xts_val_resp_state_no_movement = 3; // No movement detected 0
const unsigned char xts_val_resp_state_initializing = 4; // No movement detected 0
const unsigned char xts_val_resp_state_unknown = 6;
unsigned char recv_buf[64]; // Buffer for receiving data from radar. Size picked at random
void send_command(const unsigned char * cmd, int len) {
// Calculate CRC
char crc = xt_start;
for (int i = 0; i < len; i++)
crc ^= cmd[i];
// Add escape bytes if necessary
for (int i = 0; i < len; i++) {
if (cmd[i] == 0x7D || cmd[i] == 0x7E || cmd[i] == 0x7F)
{
//TODO: Implement escaping
}
}
// Send xt_start + command + crc_string + xt_stop
Serial.write(xt_start);
Serial.write(cmd, len);
Serial.write(crc);
Serial.write(xt_stop);
}
int receive_data() {
// Get response
char last_char = 0x00;
int recv_len = 0; //Number of bytes received
//Wait for start character
while (1)
{
char c = Serial.read(); // Get one byte from radar
if (c == xt_escape)
{
// If it's an escape character –
// ...ignore next character in buffer
Serial.read();
}
else if (c == xt_start)
{
// If it's the start character –
// ...we fill the first character of the buffer and move on
recv_buf[0] = xt_start;
recv_len = 1;
break;
}
}
// Start receiving the rest of the bytes
while (1)
{
// read a byte
char cur_char = Serial.read(); // Get one byte from radar
if (cur_char == -1) {
continue;
}
// Fill response buffer, and increase counter
recv_buf[recv_len] = cur_char;
recv_len++;
// is it the stop byte?
if (cur_char == xt_stop) {
//setColor(255, 0, 0, 1.0);
if (last_char != xt_escape)
break; //Exit this loop
}
// Update last_char
last_char = cur_char;
}
// Calculate CRC
char crc = 0;
char escape_found = 0;
// CRC is calculated without the crc itself and the stop byte, hence the -2 in the counter
for (int i = 0; i < recv_len-2; i++)
{
// We need to ignore escape bytes when calculating crc
if (recv_buf[i] == xt_escape && !escape_found) {
escape_found = 1;
continue;
}
else {
crc ^= recv_buf[i];
escape_found = 0;
}
}
// Check if calculated CRC matches the recieved
if (crc == recv_buf[recv_len-2])
{
return 0; // Return 0 upon success
}
else
{
return -1; // Return -1 upon crc failure
}
}
void empty_serial_buffer()
{
while (Serial.available())
{
Serial.read(); // Remove one byte from the buffer
}
}
void get_respiration_data() {
//The arduino is not fast enough to receive all the data from the radar (it seems)
//...so always empty the buffer of old data, so that we are sure we have fresh data
empty_serial_buffer();
if (receive_data() != 0)
{
//TODO: Something went wrong!
//blink_green();
//setColor(255, 0, 0, 1.0);
return;
}
// Now recv_buf should be filled with valid data
// Check that it's app-data we've received
if (recv_buf[1] != xts_spr_appdata)
{
//TODO: Something went wrong!
//blink_red();
return;
}
// Check that xts_id_resp_status is correct (just to make sure we are getting the right data)
long xirs_recv = recv_buf[5] | (recv_buf[4] << 8) | (recv_buf[3] << 16) | (recv_buf[2] << 24);
if (xirs_recv != xts_id_resp_status)
{
//TODO: Something went wrong!
//blink_red();
//return;
}
float * movement;
float brightness = 0;
// State code
char state_code = recv_buf[10];
switch (state_code) {
case xts_val_resp_state_breathing:
//"Breathing detected:"
//Point float pointer to the first byte of the float in the buffer
movement = (float*)&recv_buf[22];
//Get the float value
brightness = *movement;
//Movement is usually between -1 and 1, so move it to 0 to 1 instead:
brightness += 1.0;
brightness = brightness/2.0;
//Cut off values under 0 and over 1
if (brightness < 0.0)
setColor(0, 0, 255, 0.0);
else if (brightness > 1.0)
setColor(0, 0, 255, 1.0);
else
setColor(0, 0, 255, brightness);
break;
case xts_val_resp_state_movement:
// "Movement"
setColor(255, 255, 0, 1.0);
break;
case xts_val_resp_state_movement_tracking:
// "Movement tracking"
setColor(0, 255, 0, 1.0);
break;
case xts_val_resp_state_no_movement:
// "No movement"
setColor(255, 255, 255, 1.0);
break;
case xts_val_resp_state_initializing:
// "Initializing"
setColor(255, 0, 255, 1.0);
break;
case xts_val_resp_state_unknown:
// "State unknown"
setColor(255, 0, 0, 1.0);
break;
default:
setColor(255, 0, 0, 1.0);
break;
}
}
// RESET MODULE
void reset_module() {
send_command(&xts_spc_mod_reset, 1);
if (receive_data()) // Receives the "booting" state
blink_blue();
if (receive_data()) // Receives the "ready" state
blink_blue();
}
// Load respiration app
void load_respiration_app()
{
//Fill send buffer
unsigned char send_buf[5];
send_buf[0] = xts_spc_mod_loadapp;
send_buf[4] = (xts_id_app_resp >> 24) & 0xff;
send_buf[3] = (xts_id_app_resp >> 16) & 0xff;
send_buf[2] = (xts_id_app_resp >> 8) & 0xff;
send_buf[1] = xts_id_app_resp & 0xff;
//Send the command
send_command(send_buf, 5);
if (receive_data()) // Receives the acknowledge
blink_blue();
}
// Execute application
void execute_app()
{
//Fill send buffer
unsigned char send_buf[2];
send_buf[0] = xts_spc_mod_setmode;
send_buf[1] = xts_sm_run;
//Send the command
send_command(send_buf, 2);
if (receive_data()) // Receives the acknowledge
blink_blue();
}
void setColor(int red, int green, int blue, float brightness)
{
analogWrite(red_pin, 255 - red * brightness);
analogWrite(green_pin, 255 - green * brightness);
analogWrite(blue_pin, 255 - blue * brightness);
}
void blink_red() {
while(1) {
setColor(255, 0, 0, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
}
}
void blink_green() {
while(1) {
setColor(0, 255, 0, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
}
}
void blink_blue() {
while(1) {
setColor(0, 0, 255, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
}
}
void setup() {
Serial.begin(115200);
pinMode(green_pin, OUTPUT);
pinMode(blue_pin, OUTPUT);
pinMode(red_pin, OUTPUT);
//Test RGB-led
setColor(255, 0, 0, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
setColor(0, 255, 0, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
setColor(0, 0, 255, 1.0);
delay(500);
setColor(0, 0, 0, 0.0);
delay(500);
reset_module();
load_respiration_app();
execute_app();
//Set initializing color
setColor(255, 0, 255, 1.0);
}
void loop() {
get_respiration_data();
}
More Arduino Tutorials
Basic Electronics for Arduino Makers
Learn the basics that every Arduino maker should know, and it'll open you up to a world of possibilities! Sign up for my circuit tips by email and I'll send you the eBook:
